자동 경주 감지
출발선 트리거, 실시간 순위, 결승 감지. 사람의 개입 없이 시스템이 경주 상태를 파악합니다.
0 Hz
초당·마리당 위치 측정 횟수
cm
RTK급 정밀도, fix quality 4/5
<1 s
장비에서 화면까지의 지연 시간
0+
병렬 수집 채널 — 전체 출전마 동시 처리
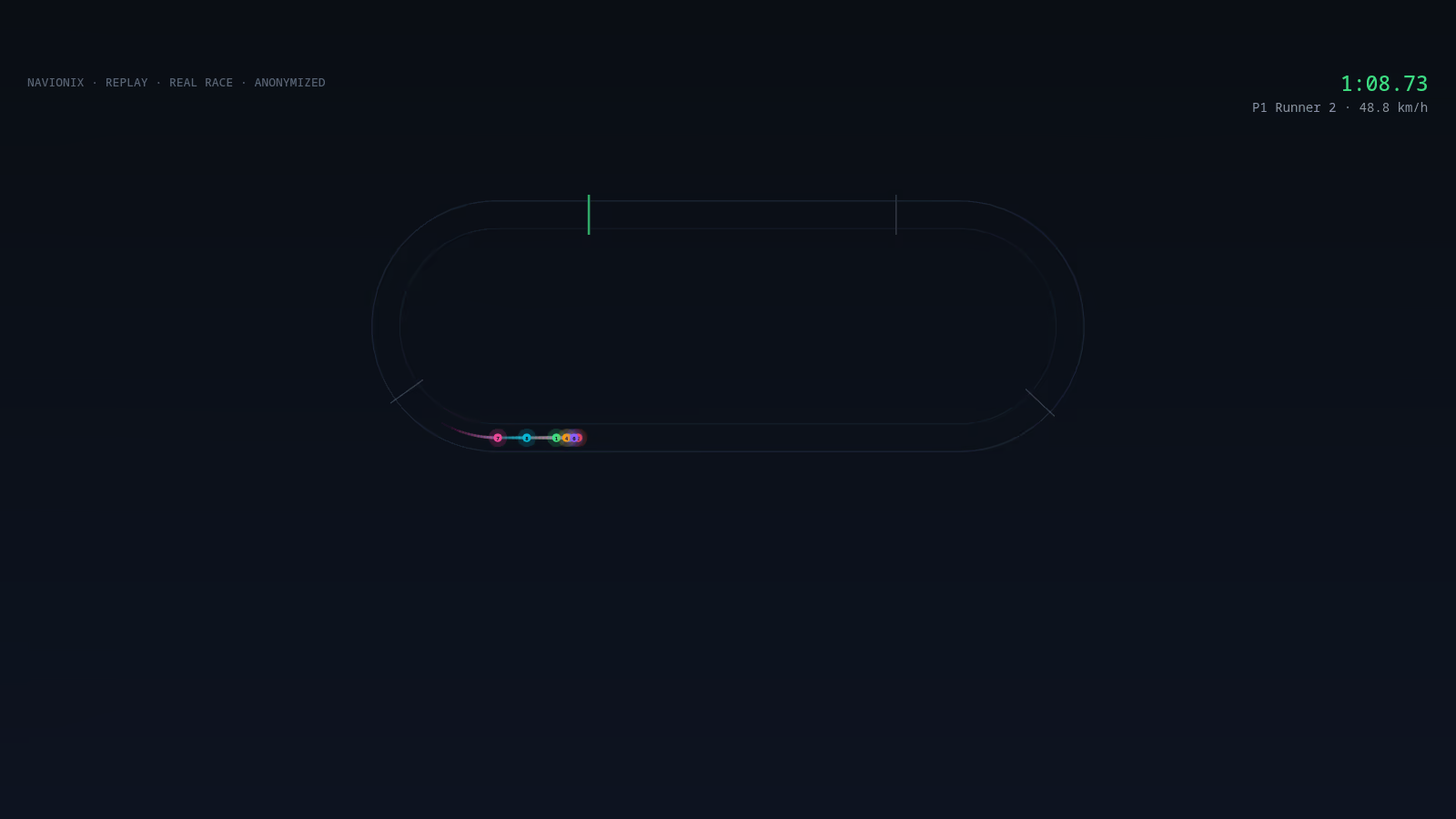
01 · 실시간 트래킹
RTK GNSS 수신기로 모든 말의 위치를 실시간 파악합니다. 순위, 시간·거리 차이, 순간 속도가 경주 진행에 따라 갱신되며 — 결승선과 출발선이 달라도 다중 바퀴 거리 계산은 정확하게 유지됩니다.
익명화된 실제 경주의 실시간 순위: 주행 거리 기준으로 정렬된 말들과 선두와의 시간 차이, 순간 속도가 지속적으로 갱신됩니다.
02 · 경주 인텔리전스
출발선 트리거, 실시간 순위, 결승 감지. 사람의 개입 없이 시스템이 경주 상태를 파악합니다.
모든 계시선에서 말별 정확한 통과 시각 — PostGIS 기하 연산으로 계산됩니다.
순위, 시간·거리 차이, 순간·평균 속도 — 경주 내내 지속적으로 갱신됩니다.
03 · 리플레이
부드러운 보간이 적용된 전체 리플레이 — 어떤 경주든, 어떤 속도로든, 모든 말, 모든 미터. 서버 측 궤적 샘플링으로 리플레이 로딩이 10–20× 빨라집니다. 더 깊이: 속도 곡선, 구간 비교, 출발 분석, 주행 거리.
04 · 텔레메트리
결승선 이후, 동일한 100Hz 스트림이 말별 리포트가 됩니다 — 출발, 순항 속도, 막판 스퍼트, 최고 속도, 주로 효율, 일정함 — 원시 데이터에서 자동으로 계산됩니다.
텔레메트리
GPS 데이터 · 100Hz 수집 · 실제 경주 · 익명화
| # | 출전마 | 지연 | 출발 | 순항 | 막판 | 최고 | 주로 | 일정함 | 감속 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 4 Runner 4 | +0.5s | 50.5 km/h | 48.9 km/h | 47.4 km/h ▼ −3.1% vs 순항 | 52.8 km/h @1015m · 중반 | ×1.062 편차 2.3/5.2m | 3.5% | 0 |
| 2 | 1 Runner 1 | +0.5s | 49.2 km/h | 49.6 km/h | 48.5 km/h ▼ −2.3% vs 순항 | 52.3 km/h @1170m · 후반 | ×1.064 편차 3.2/5.9m | 3.4% | 0 |
| 3 | 3 Runner 3 | 0.0s | 49.0 km/h | 48.7 km/h | 47.5 km/h ▼ −2.4% vs 순항 | 52.2 km/h @32m · 초반 | ×1.044 편차 2.3/6.3m | 2.4% | 0 |
| 4 | 6 Runner 6 | 0.0s | 50.3 km/h | 48.6 km/h | 47.0 km/h ▼ −3.3% vs 순항 | 53.6 km/h @44m · 초반 | ×1.041 편차 2.2/7.5m | 1.8% | 0 |
| 5 | 2 Runner 2 | 0.0s | 50.1 km/h | 47.6 km/h | 43.1 km/h ▼ −9.5% vs 순항 | 52.7 km/h @90m · 초반 | ×1.026 편차 1.3/5.2m | 2.2% | 0 |
| 6 | 8 Runner 8 | +0.7s | 48.1 km/h | 47.2 km/h | 44.9 km/h ▼ −4.9% vs 순항 | 49.8 km/h @1081m · 후반 | ×1.017 편차 1.9/5.9m | 2.5% | 0 |
| 7 | 7 Runner 7 | +1.1s | 47.8 km/h | 46.7 km/h | 43.8 km/h ▼ −6.2% vs 순항 | 50.3 km/h @1053m · 중반 | ×1.009 편차 1.9/6.4m | 3.6% | 0 |
05 · 아키텍처
Rust 백엔드 — 메모리 안전, 예측 가능한 지연 시간, 부하 상황에서도 GC 멈춤 없음. 다중 문장 NMEA 융합이 위치, 속도, 방향, 측정별 정확도를 하나의 일관된 데이터 포인트로 결합합니다. 모든 측정값은 PostgreSQL + PostGIS에 저장됩니다: 감사 가능, 재생 가능. 부하 급증 시 점진적 성능 저하와 백프레셔 처리.
20+개 병렬 채널
GGA + VTG + GST 융합
PostGIS 통과 판정
무제한 시청자
장비 → 서버 → 화면 · <1s 종단 간


06 · 연동
깔끔한 REST + WebSocket API. 단일 바이너리 배포 — 백엔드와 프런트엔드가 하나의 산출물로 제공됩니다.