Détection automatique de la course
Déclenchement sur la ligne de départ, classement en direct, détection de l’arrivée. Le système connaît l’état de la course sans intervention humaine.
Live · Suivi GNSS RTK
Navionix suit chaque cheval à 100Hz avec une précision RTK — classement en direct, temps intermédiaires et replay, des stalles de départ à la photo-finish.
0 Hz
Positions par seconde, par cheval
cm
Précision RTK, fix quality 4/5
<1 s
Latence de bout en bout, du capteur à l’écran
0+
Canaux d’ingestion parallèles — tout un peloton à la fois
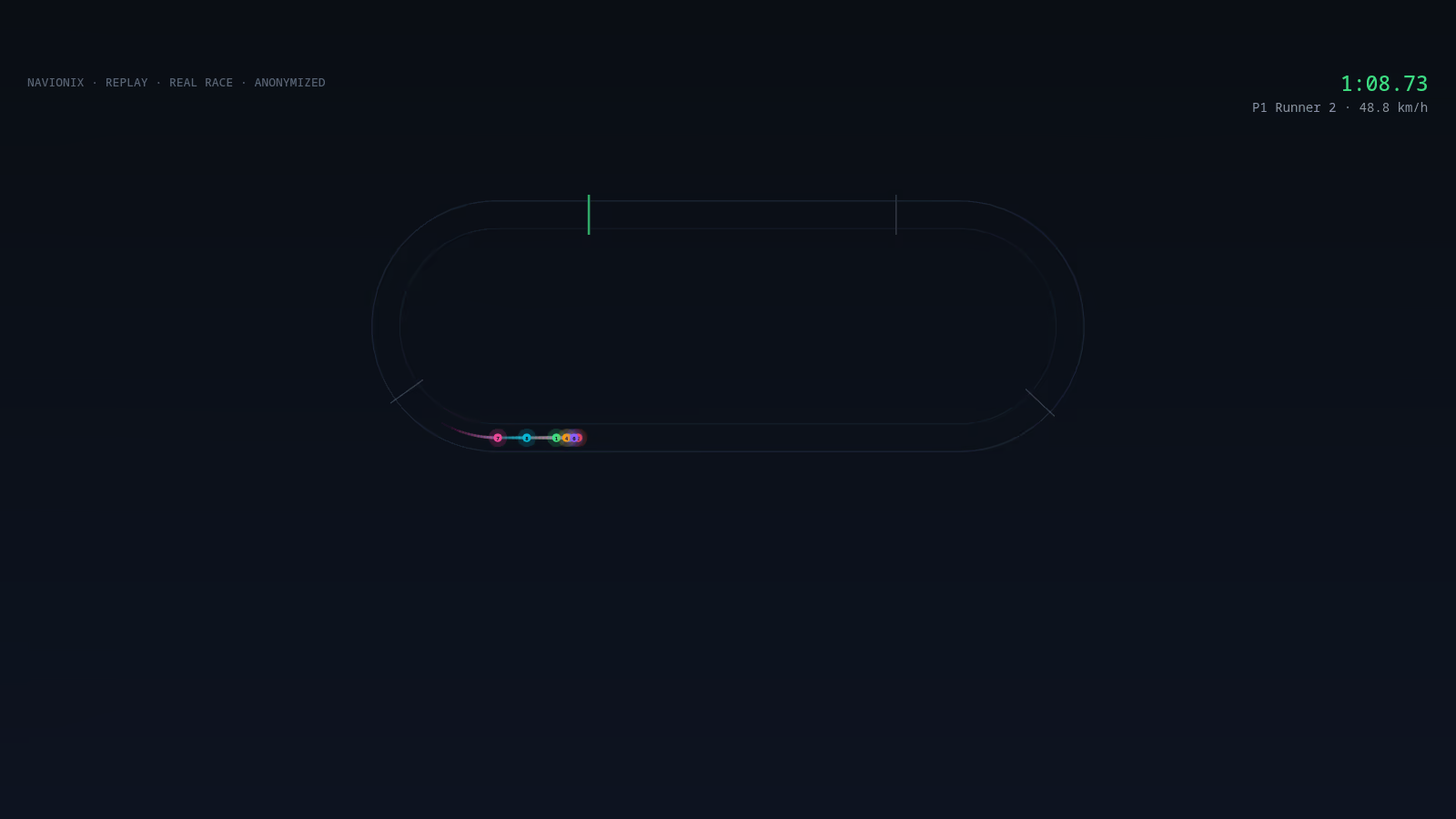
01 · Suivi en direct
Chaque cheval positionné en temps réel par des récepteurs GNSS RTK. Positions, écarts en temps et en distance et vitesse instantanée se mettent à jour au fil de la course — et le calcul des distances multi-tours reste exact même quand la ligne d’arrivée n’est pas celle du départ.
Classement en direct d’une course réelle anonymisée : chevaux classés par distance parcourue, avec les écarts au leader et les vitesses instantanées, mis à jour en continu.
02 · Intelligence de course
Déclenchement sur la ligne de départ, classement en direct, détection de l’arrivée. Le système connaît l’état de la course sans intervention humaine.
Horodatages exacts de franchissement à chaque ligne de chronométrage, par cheval — calculés avec la géométrie PostGIS.
Positions, écarts en temps et en distance, vitesses instantanées et moyennes — mis à jour en continu, toute la course.
03 · Replay
Replay complet avec interpolation fluide — n’importe quelle course, à n’importe quelle vitesse, chaque cheval, chaque mètre. L’échantillonnage des trajectoires côté serveur charge les replays 10–20× plus vite. Puis allez plus loin : courbes de vitesse, comparaisons sectionnelles, analyse du départ, terrain couvert.
04 · Télémétrie
Après l’arrivée, le même flux à 100Hz devient un rapport par cheval — départ, régime de croisière, finish, pointe, efficacité de trajectoire, régularité — calculé automatiquement à partir des fixes bruts.
Télémétrie
données GPS · échantillonnage 100Hz · course réelle anonymisée
| # | Cheval | Retard | Départ | Régime | Final | Pointe | Trajet | Régularité | Baisses |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 4 Runner 4 | +0.5s | 50.5 km/h | 48.9 km/h | 47.4 km/h ▼ −3.1% vs régime | 52.8 km/h @1015m · milieu | ×1.062 corde 2.3/5.2m | 3.5% | 0 |
| 2 | 1 Runner 1 | +0.5s | 49.2 km/h | 49.6 km/h | 48.5 km/h ▼ −2.3% vs régime | 52.3 km/h @1170m · fin | ×1.064 corde 3.2/5.9m | 3.4% | 0 |
| 3 | 3 Runner 3 | 0.0s | 49.0 km/h | 48.7 km/h | 47.5 km/h ▼ −2.4% vs régime | 52.2 km/h @32m · début | ×1.044 corde 2.3/6.3m | 2.4% | 0 |
| 4 | 6 Runner 6 | 0.0s | 50.3 km/h | 48.6 km/h | 47.0 km/h ▼ −3.3% vs régime | 53.6 km/h @44m · début | ×1.041 corde 2.2/7.5m | 1.8% | 0 |
| 5 | 2 Runner 2 | 0.0s | 50.1 km/h | 47.6 km/h | 43.1 km/h ▼ −9.5% vs régime | 52.7 km/h @90m · début | ×1.026 corde 1.3/5.2m | 2.2% | 0 |
| 6 | 8 Runner 8 | +0.7s | 48.1 km/h | 47.2 km/h | 44.9 km/h ▼ −4.9% vs régime | 49.8 km/h @1081m · fin | ×1.017 corde 1.9/5.9m | 2.5% | 0 |
| 7 | 7 Runner 7 | +1.1s | 47.8 km/h | 46.7 km/h | 43.8 km/h ▼ −6.2% vs régime | 50.3 km/h @1053m · milieu | ×1.009 corde 1.9/6.4m | 3.6% | 0 |
05 · Architecture
Un backend Rust — memory-safe, latence prévisible, aucune pause de garbage collection sous charge. La fusion NMEA multi-trames combine position, vitesse, cap et précision par fix en un seul point de donnée cohérent. Chaque fix est conservé dans PostgreSQL + PostGIS : auditable, rejouable. Dégradation maîtrisée et backpressure en cas de pic.
20+ canaux parallèles
fusion GGA + VTG + GST
franchissements PostGIS
spectateurs illimités
capteur → serveur → écran · <1s de bout en bout


06 · Intégrations
API REST + WebSocket propres. Déploiement en binaire unique — backend et frontend dans un seul artefact.
Parlez-nous de votre piste et de votre chronométrage — nous vous montrerons une démo en direct.
navionix@ippodromoghirlandina.it