Rilevamento automatico della corsa
Trigger sulla linea di partenza, classifica live, rilevamento dell’arrivo. Il sistema conosce lo stato della corsa senza intervento umano.
Live · Tracciamento GNSS RTK
Navionix traccia ogni cavallo a 100Hz con precisione RTK — classifica live, tempi parziali e replay, dal cancello di partenza al fotofinish.
0 Hz
Rilevamenti di posizione al secondo, per cavallo
cm
Precisione RTK, fix quality 4/5
<1 s
Latenza end-to-end, dal dispositivo allo schermo
0+
Canali di ingestione paralleli — un intero campo in simultanea
01 · Tracciamento live
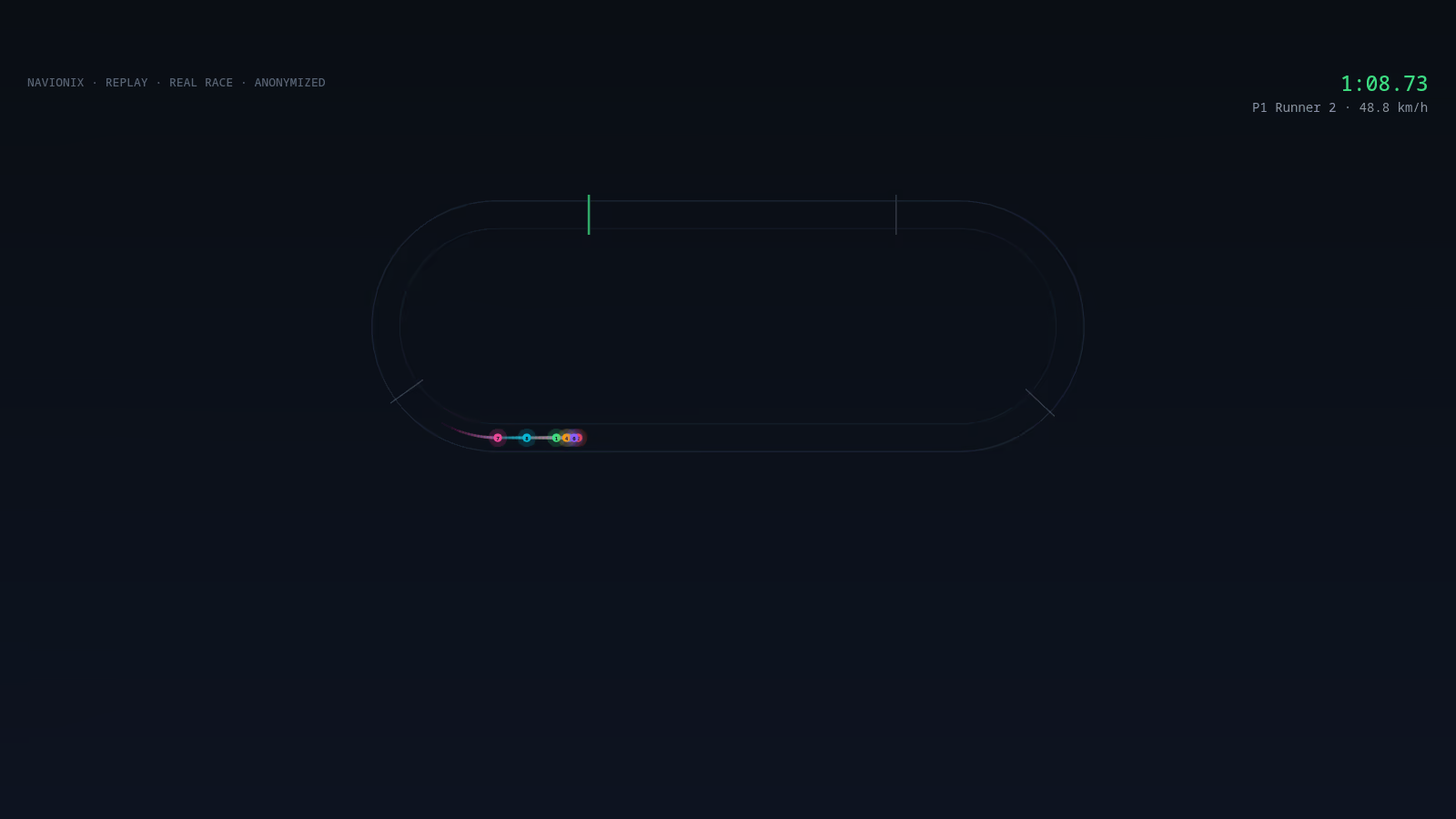
Ogni cavallo posizionato in tempo reale da ricevitori GNSS RTK. Posizioni, distacchi in tempo e distanza e velocità istantanea si aggiornano mentre la corsa si svolge — e il calcolo delle distanze multi-giro resta corretto anche quando il traguardo non coincide con la partenza.
Classifica live da una gara reale anonimizzata: cavalli ordinati per distanza percorsa, con distacchi dal leader e velocità istantanee, in aggiornamento continuo.
02 · Intelligenza di corsa
Trigger sulla linea di partenza, classifica live, rilevamento dell’arrivo. Il sistema conosce lo stato della corsa senza intervento umano.
Timestamp esatti di attraversamento a ogni linea di cronometraggio, per cavallo — calcolati con geometria PostGIS.
Posizioni, distacchi in tempo e distanza, velocità istantanee e medie — aggiornati di continuo, per tutta la corsa.
03 · Replay
Replay completo con interpolazione fluida — qualsiasi corsa, a qualsiasi velocità, ogni cavallo, ogni metro. Il campionamento server-side delle traiettorie carica i replay 10–20× più velocemente. Poi vai a fondo: curve di velocità, confronti sezionali, analisi della partenza, terreno percorso.
04 · Telemetria
Dopo il traguardo, lo stesso flusso a 100Hz diventa un report per cavallo — partenza, regime di crociera, allungo finale, picco, efficienza di percorso, regolarità — calcolato automaticamente dai fix grezzi.
Telemetria
dati GPS · campionamento 100Hz · gara reale anonimizzata
| # | Cavallo | Ritardo | Avvio | Regime | Finale | Picco | Percorso | Regolarità | Cali |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 4 Runner 4 | +0.5s | 50.5 km/h | 48.9 km/h | 47.4 km/h ▼ −3.1% vs regime | 52.8 km/h @1015m · metà | ×1.062 corda 2.3/5.2m | 3.5% | 0 |
| 2 | 1 Runner 1 | +0.5s | 49.2 km/h | 49.6 km/h | 48.5 km/h ▼ −2.3% vs regime | 52.3 km/h @1170m · finale | ×1.064 corda 3.2/5.9m | 3.4% | 0 |
| 3 | 3 Runner 3 | 0.0s | 49.0 km/h | 48.7 km/h | 47.5 km/h ▼ −2.4% vs regime | 52.2 km/h @32m · inizio | ×1.044 corda 2.3/6.3m | 2.4% | 0 |
| 4 | 6 Runner 6 | 0.0s | 50.3 km/h | 48.6 km/h | 47.0 km/h ▼ −3.3% vs regime | 53.6 km/h @44m · inizio | ×1.041 corda 2.2/7.5m | 1.8% | 0 |
| 5 | 2 Runner 2 | 0.0s | 50.1 km/h | 47.6 km/h | 43.1 km/h ▼ −9.5% vs regime | 52.7 km/h @90m · inizio | ×1.026 corda 1.3/5.2m | 2.2% | 0 |
| 6 | 8 Runner 8 | +0.7s | 48.1 km/h | 47.2 km/h | 44.9 km/h ▼ −4.9% vs regime | 49.8 km/h @1081m · finale | ×1.017 corda 1.9/5.9m | 2.5% | 0 |
| 7 | 7 Runner 7 | +1.1s | 47.8 km/h | 46.7 km/h | 43.8 km/h ▼ −6.2% vs regime | 50.3 km/h @1053m · metà | ×1.009 corda 1.9/6.4m | 3.6% | 0 |
05 · Architettura
Backend in Rust — memory-safe, latenza prevedibile, nessuna pausa di garbage collection sotto carico. La fusione NMEA multi-sentence combina posizione, velocità, direzione e accuratezza per fix in un unico punto dati coerente. Ogni fix è registrato in PostgreSQL + PostGIS: verificabile, riproducibile. Degradazione controllata e backpressure sotto carico di picco.
20+ canali paralleli
fusione GGA + VTG + GST
attraversamenti PostGIS
spettatori illimitati
dispositivo → server → schermo · <1s end-to-end


06 · Integrazioni
API REST + WebSocket pulite. Deployment a binario singolo — backend e frontend in un unico artefatto.
Raccontaci il tuo tracciato e il tuo sistema di cronometraggio — ti mostriamo una demo dal vivo.
navionix@ippodromoghirlandina.it